Benchmarking Collaborative Manufacturing
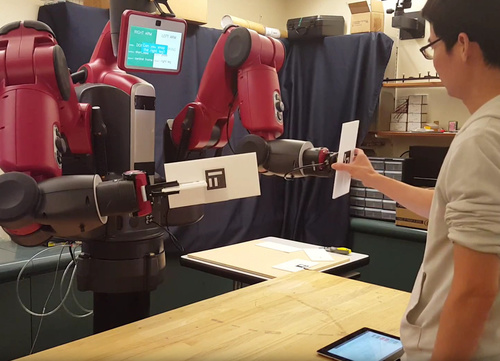 The human-robot collaboration (HRC) model set is intended to ease the design of human-robot collaboration experiments. It focuses on scenarios like the collaborative assembly of furniture and consists of miniature pieces of furniture composed of a combination of standard hardware components and 3D printed custom designs. The parts have been chosen and designed for the purpose of robotics experiments with an additional care on modularity. The model has been thought to be easy to extend and distribute.
The human-robot collaboration (HRC) model set is intended to ease the design of human-robot collaboration experiments. It focuses on scenarios like the collaborative assembly of furniture and consists of miniature pieces of furniture composed of a combination of standard hardware components and 3D printed custom designs. The parts have been chosen and designed for the purpose of robotics experiments with an additional care on modularity. The model has been thought to be easy to extend and distribute.
This projects intends to steer the community of human robot collaboration researchers into a convergence of experimental tools and task definitions. This endeavour targets both to improve the reproducibility of research from the field, at the experiment level, and to ease the articulation of related pieces of work and hence the transfer of knowledge, at the conceptual level. More information is available on the project website, github account, and the following video.
Ergo-Robots / Flowers-Fields
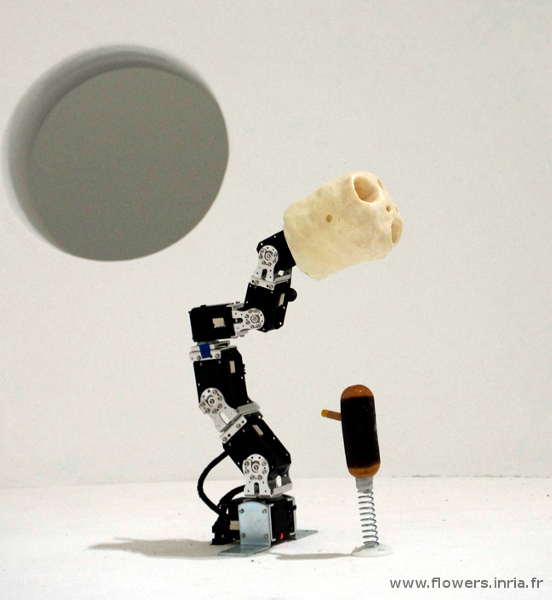 Ergo-Robot is the name given to the team project that was exhibited at
Fondation Cartier pour l'Art Contemporain.
More details about the project are available on
this dedicated web page
or
this video.
Ergo-Robot is the name given to the team project that was exhibited at
Fondation Cartier pour l'Art Contemporain.
More details about the project are available on
this dedicated web page
or
this video.
{kind=link}
Pubs
Pubs is an open-source command line tool to organize scientific bibliographies. It stores documents together with their bibliographic data (bibtex) and provides command line access to basic and advanced manipulation of the library.
Pubs keeps bibliographic data separated from metadata (including links to pdf or tags); it stores everything in plain text so it can be manually edited or version controlled. The project was started in collaboration with Fabien Bénureau.