Research focus
My research is mainly framed in the developmental robotics approach and also focuses on social interactions between humans and robots, in particular in the context of collaboration. It consist in developping machine learning models of the mechanisms that make possible the emergence of structure in perceptual and motor development.
- Learning to recognize parallel motion primitives with linguistic descriptions using NMF
- Emergence of multimodal concepts
- Motion decomposition in goal space
- Decision taking for human robot collaboration
- Language understanding in collaborative contexts
One question that I study is how a developmental cognitive agent can discover a dictionary of primitive patterns from its multimodal perceptual flow. Such patterns can be primitive sounds, such as phonemes or words, primitive dance motions, or primitive objectives that compose complex tasks. Each of these problems is a difficult and ambiguous one (see for exampe Quine's indeterminacy of translation); they include aspects of the problem of grounding symbols as well as of the acquisition of concepts. To overcome these ambiguities, I demonstrated how framing together such questions from various modalities, into an instance of multimodal learning, can help resolve their inherent ambiguity, as explained in Emergence of multimodal concepts.
In particular, I used dictionary learning algorithms such as matrix factorization and in particular nonnegative matrix factorization to model the learning of parallel motion primitive from the observation of choreographies, but also to model the emergence of multimodal concepts as pairs of acoustic words and their meaning such as visual objects.
Context: Developmental and social robotics
Why developmental robotics?
The motivations behind developmental and social robotics come from two goals, very different in nature, but pointing toward the same area of research.
- Building better robots
Science fiction has been exploring for some time now all the possible impacts of robots on our every day life and spreading the idea that robots could, as tools or companions, be a great improvement to our quality of life, provided that security and ethical issues are well dealt with. Actual robots are however still mainly confined to factories or have to be remotely controlled by human operators.
The truth is that robots currently are only capable of very poor adaptivity to unpredictable environments they have not been specifically programmed for. Real human environment are such environments and thus this limitation constitutes a strong obstacle to deployment of robots in every day life applications.
- Understanding human brain
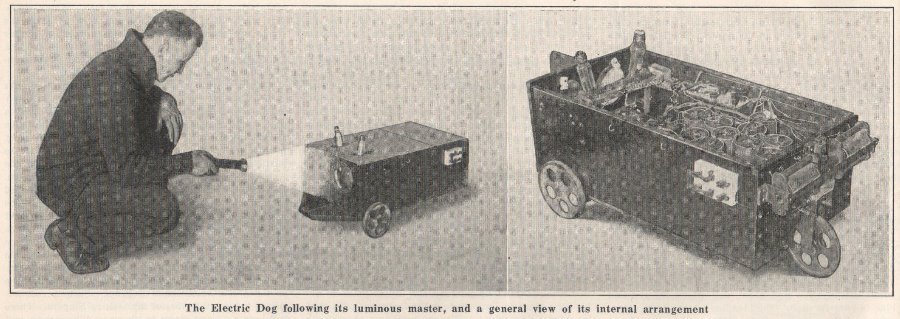
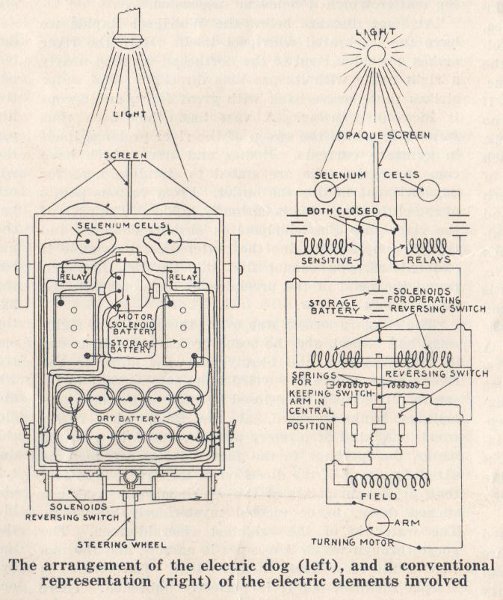
 Robots also constitutes a unique tool to model some biological, psychological or cognitive process and systems. This motivation lead to some early robotics realizations that had a great impact on biological scientific communities, such as 1912 Hammond and Miessner's electric dog. In the same way building robots as models of the child development helps us exploring the mainly unresolved question of how children intelligence develops until reaching adult state. For that purpose developmental robotics research is fully complementary to the work done in other disciplinary fields.
Robots also constitutes a unique tool to model some biological, psychological or cognitive process and systems. This motivation lead to some early robotics realizations that had a great impact on biological scientific communities, such as 1912 Hammond and Miessner's electric dog. In the same way building robots as models of the child development helps us exploring the mainly unresolved question of how children intelligence develops until reaching adult state. For that purpose developmental robotics research is fully complementary to the work done in other disciplinary fields.
{kind=link}
A robot that learns like a child
A large part of research in both cognitive sciences and artificial intelligence has been mainly focused on the problem of understanding or imitating the adult mind. However the somehow opposite idea that human mind should be studied through the processes of its development and maturation was already clear in Turing's mind sixty years ago.
Instead of trying to produce a programme to simulate the adult mind, why not rather try to produce one which simulates the child's? If this were then subjected to an appropriate course of education one would obtain the adult brain. Presumably the child brain is something like a notebook as one buys it from the stationer's. Rather little mechanism, and lots of blank sheets. (Mechanism and writing are from our point of view almost synonymous.) Our hope is that there is so little mechanism in the child brain that something like it can be easily programmed. The amount of work in the education we can assume, as a first approximation, to be much the same as for the human child.
Development is a trajectory shaped by the physical and social environments
Developmental and social robotics takes their roots in developmental and social psychology. A very important idea from these fields is that intelligent behaviors emerge and are shaped through the interaction between an agent and its physical and social environment.
L'intelligence ne débute ainsi ni par la connaissance du moi ni par celle des choses comme telles, mais par celle de leur interaction, et c'est en s'orientant simultanément vers les deux pôles de cette interaction qu'elle organise le monde en s'organisant elle-même.
Developmental and social robotics thus don't focus directly on building intelligent robots but more specifically on studying the behavior and learning mechanisms that makes the interaction between these robots and their environment evolve towards structured interactions with persistent patterns.
What is a complex movement or skill?
The question of the complexity of movements and skills comes from the observation of human learners. It seems both an empirical evidence in pedagogy and a natural way to proceed that learning occurs in a cumulative manner, starting simple and then growing in complexity.
It is quite easy to have an intuition about what a simple or a complex movement are: driving a plane is obviously more complex than grasping simple toys. However if one looks at what robots can do, it seems that currently robots are better at driving planes (or helicopters) than at grasping objects. Of course this example is not really fair, but it points out that actually defining what is a complex movement or skill is probably not as easy as it seems. Indeed, the complexity of a motion or an action is highly subjective to the agent's body, experience, culture, etc. Taking another example, why is a newborn gnu capable of learning to walk within a few minutes when human infants need months to achieve a similar behavior? Is this a proof that gnu brain is more advanced regarding the learning of walking, or the expression of an evolutionary trade-off between the ability to quickly learn one task and the ability to learn a wider variety of tasks?
A fundamental question behind these realities, both for biologists and roboticists, is to understand how is life long learning possible in a way that enables to efficiently re-use previously acquired knowledges and skills. The concepts of motor synergies and motion primitives have been introduced as a possible answer to this question by both psychologists and roboticists. Motor primitives represent simple building blocks that can be composed to form complex motions. In this approach the question of defining complexity of motions is decomposed into two questions: "What is a simple motion?" and "How to build complexity from simpler subparts?"
Actually, for roboticists, the question "What is a simple motion?" is deeply related to the question "How to represent motions and actions?". Indeed simplicity, for a computer, often means efficiency of representation (or compression) whereas, for a human, a motion that is simple to produce is often called natural. It follows that the first question on defining simplicity of motions can be studied through the research of motion representation that lead to efficient representation of natural motions. Then the question of complexity of motions can be studied through the different ways of composing or combining such simple parts in a process often referred as scaffolding.